지금까지 우리는 전달함수를 통해 특성방정식을 찾고 그 특성방정식으로부터 제어계의 극점과 영점을 통해 제어계가 안정한지 불안정한지 판별하였습니다.
그런데 이들을 살펴보며 고려하던 대상에서 제외가 되었던 부분이 있습니다. 그것이 무엇인지 살펴보기 위해 먼저 대표적인 제어계인 표준 Feed-back 시스템을 가져오겠습니다.
이로부터 우리는 전달함수를 다음과 같이 구하였습니다.

여기서 개루프 전달함수은 G(s)H(s)가 다음과 같은 형태로 나타난다고 가정하도록 하겠습니다.

이때 N(s)=0으로 만드는 s값이 개루프 전달함수의 영점, D(s)=0으로 만드는 s값이 개루프 전달함수의 극점입니다.
그런데 제어계의 안정도를 살펴보기 위해서는 전체 전달함수로부터 얻은 특성방정식의 근인 특성근의 위치였습니다. 따라서 이 개루프 전달함수를 특성방정식에 대입하면,

위와 같이 나타나게 됩니다. 양변에 D(s)를 곱해 다시 정리하면,

라고 쓸 수 있습니다. 이 방정식의 근이 바로 전체 전달함수의 특성근입니다. 그런데, 만약 이 방정식에서 K값이 변화하게 되면 어떻게 될까요?
만약 이 상수 K가 0에서부터 무한대까지 변화하게 되면 특성근의 위치가 변화하게 되고, 안정도에 영향을 미칠 수 있습니다. 바로 이 상수 K에 의해 특성근이 어떻게 변화하는지를 그린 것이 바로 근궤적입니다.
간단한 예제를 통해 어떤 것인지 살펴보도록 하겠습니다.
ex.1) 개루프 전달함수가 다음과 같을 때, 이득상수 K의 변화에 대한 특성근의 변화는?
특성근은 개루프 전달함수로부터가 아니라 특성방정식을 통해 구해야 하므로,

s에 대해 정리하면,

근의 공식을 이용해 근을 구하면,

가 됩니다. 이 특성근은 근호 안의 K값의 변화에 따라 변화하게 되겠죠? 각각의 경우로 나누어 보겠습니다.
1) K=0 : 대입해보면 특성근은 s=0, -2이 됩니다.
2) 0<K<1 : 이 경우는 근호 안의 1-K가 양수이기 때문에 두 개의 서로다른 음의 실근을 가지게 됩니다.
3) K=1 : s=-1의 중근을 가지게 됩니다.
4) K>1 : 이 경우 근호 안의 1-K가 음수가 되어 두 개의 음의 실수브를 가지는 공액 복소근이 됩니다.
그럼 이 네 가지 경우를 모두 모아 그래프로 표현해보도록 하겠습니다.

위와 같이 그릴 수 있습니다. 그럼 이 그래프로 부터 알 수 있듯이, K=0일때, 한 근이 원점에 존재하여 이 제어계를 임계안정하게 만듭니다. 따라서 K>0인 범위에서 이 제어계는 안정하다는 사실을 알 수 있습니다.
따라서 이 근궤적을 통해 우리는 어떤 이득상수 K값을 가져야 제어계를 안정하게 만들 수 있는지 알 수 있습니다. 그러므로 이 근궤적을 어떻게 그리는지 살펴보고 직접 그려보며 어떤 형태로 그림이 그려지는지 살펴보도록 하겠습니다.
- 근궤적의 작성법
1. 근궤적의 출발점(K=0) : 개루프 전달함수의 극점
근궤적의 출발점은 개루프 전달함수의 극점으로부터 시작합니다. 위에서 우리는 개루프 전달함수를 다음과 같이 표현하였습니다.
그리고 이로부터 다음과 같은 특성방정식을 얻었습니다.
앞서 말씀드린 것처럼 근궤적은 이득상수 K값의 변화에 따른 근의 변화였습니다. 따라서 시작점은 K값이 0으로부터 출발합니다. 따라서 이 때의 특성방정식은 다시 쓰면,
이 되어 개루프 전달함수의 극점으로부터 근궤적이 시작되게 됩니다.
2. 근궤적의 종착점(K=∞) : 개루프 전달함수의 영점
근궤적의 끝은 K값이 계속해서 무한대로 발산하는 부분입니다. 그렇다면 우리가 알고 있는 특성방정식인
에서 K값이 매우 크기 때문에 이 방정식에서 얻는 근은 KN(s)항에 의해 결정되어지게 되므로 근궤적은 개루프 전달함수의 영점을 향해 나아가게 됩니다.
3. 근궤적의 개수 : 영점과 극점의 개수 중 큰 것과 일치
출발점이던 종착점이던 남아있는 지점이 있다면 근궤적이 이상하게 그려지겠죠? 따라서 영점과 극점의 갯수 중 큰 것과 근궤적의 개수는 일치하게 됩니다. 만약 영점이 0개, 극점이 4개 있다면 근궤적은 4개가 됩니다.
4. 근궤적의 대칭성 : 실수축에 대해 대칭
개루프 전달함수의 극점들은 공액복소수가 아닌 형태로 존재할 수 없습니다. 따라서 근궤적은 언제나 실수축 위에 그려지거나 실수축에 대해 대칭하게 됩니다.
5. 근궤적 점근선의 각도 : 개루프 전달함수의 영점과 극점의 갯수를 이용해 구합니다.

여기서 p와 z는 극점과 영점의 갯수입니다. 값이 아니라 갯수라는 점에 주의해야 합니다.
6. 근궤적 점근선의 교차점 : 근궤적 점근선의 교차점 역시 영점과 극점의 갯수를 이용해 구합니다.

분자의 극점과 영점의 총 합은 각 점들의 총합이지만, 분모의 p와 z는 극점과 영점의 갯수를 의미합니다. 헷갈릴 수 있으니 근궤적 점근선의 각도와 교차점에 대한 예제를 통해 한번 살펴보도록 하겠습니다.
ex.2) 개루프 전달함수가 다음과 같을 때 근궤적 점근선의 각도와 교차점을 구하시오.

먼저 영점은 s=-1로 1개가 있습니다. 극점은 s=0, s=-1, s=-1+j, s=-1-j 의 4개가 있습니다. 따라서 근궤적 점근선의 각도를 구하기 위한 k를 구해보면 k=p-z-1=4-1-1=2가 됩니다. 그러므로 점근선의 각도는
1) k=0 ;

2) k=1 ;

3) k=2 ;

그리고 근궤적 점근선의 교차점은 다음과 같습니다.

따라서 -5/3지점에서 위의 근궤적 점근선들이 교차한다는 것을 알 수 있습니다. 그럼 이 점근선들만 한번 그려보면,
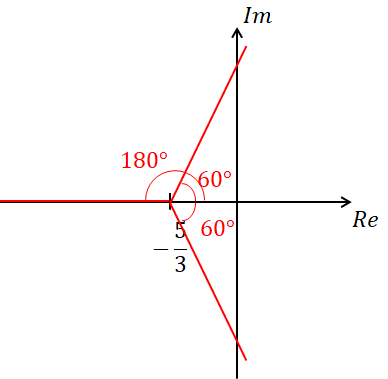
위와 같이 그릴 수 있습니다.
7. 근궤적의 범위 : 실수축 상에서 그 지점의 오른쪽에 있는 극점과 영점의 합이 홀수가 되는 구간에만 근궤적은 존재합니다.
직접 예제를 통해 살펴보도록 하겠습니다.
ex.3) 개루프 전달함수가 다음과 같을 때 근궤적의 범위를 구하시오.

먼저 0점은 없고, 극점은 0, -1, -2라는 것을 알 수 있습니다. 점근선의 각도를 구하기 위해 k를 살펴보면, k=p-z-1=3-0-1=2 입니다. 그럼 위의 예제와 같은 점근선 각도를 가진다는 것을 알 수 있습니다.
점근선의 교차점은

입니다. 따라서 먼저 근궤적의 점근선을 그려보면,
와 같이 그릴 수 있습니다. 그럼 여기서 -2보다 작은 영역에서 오른쪽을 바라보았을 때, 극점의 개수가 3개가 있다는 것을 알 수 있습니다.
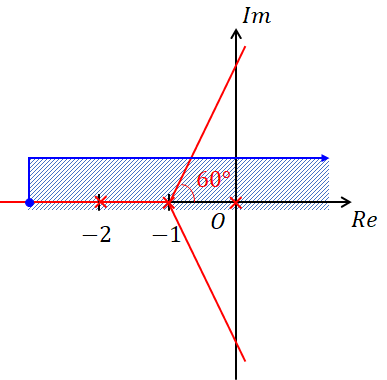
따라서 해당 영역에는 극점과 영점 갯수의 합이 홀수(3+0=3)이므로 이 영역에는 근궤적이 존재한다는 것을 알 수 있습니다.
같은 이유로 -2와 -1사이의 영역에선 오른쪽에 극점과 영점 갯수의 합이 2개이므로 근궤적이 존재하지 않고, -1과 0사이의 영역에서는 극점과 영점 갯수의 합이 1개 이므로 근궤적이 존재합니다. 그럼 근궤적이 존재하는 영역을 다시 표현하면 다음과 같습니다.

8. 근궤적의 허수축과의 교차점 : 루스-후르비츠법에 의한 임계안정조건으로부터 구할 수 있습니다.
역시 예제를 살펴보겠습니다.
ex.4) 개루프 전달함수가 다음과 같을 때 근궤적이 허수축과 교차하는 지점을 구하시오.
이와 같이 주어지는 문제에서 주의할 점은 루스-후르비츠법을 적용하기 위해서 필요한 것은 전체 전달함수의 특성방정식입니다. 따라서 개루프 전달함수가 위와 같으니 전체 전달함수의 특성방정식은 다음과 같습니다.

그러므로 s에 대해 방정식을 정리하면,

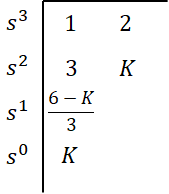
루스표를 바로 작성하도록 하겠습니다.
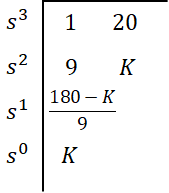
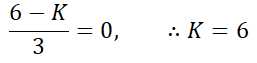
여기서 루스표에서 임계안정조건으로부터,

이므로, K=180이라는 것을 알 수 있습니다. 이제 이 K값을 포함하고 있는 s^2차 항의 원소들을 이용해 보조방정식을 세우도록 하겠습니다.

이 방정식의 해가 바로 우리가 구하고자하는 근궤적의 허수축과의 교차점입니다. 따라서,

인 지점에서 근궤적이 허수축과 교차한다는 것을 알 수 있습니다.
9. 근궤적의 이탈점 : 근궤적의 이탈점은 근궤적이 실수축으로부터 이탈하는 점을 말합니다. 이 지점은 전체 전달함수로부터 얻는 특성방정식을 K에 대해 정리한 뒤, 그 방정식을 s에 대해 미분한 방정식의 해입니다.
그럼 위의 3번 예제를 이용해 허수축의 교차점부터 근궤적의 이탈점까지 구해 근궤적을 그려보도록 하겠습니다.
ex.5) 개루프 전달함수가 다음과 같을 때 근궤적을 그리시오.
위에서 우리는 근궤적 점근선의 각도와 교차점, 근궤적 범위를 구하였습니다. 따라서 다음으로 필요한 근궤적의 허수축과 교차점과 이탈점을 구해보도록 하겠습니다.
1) 근궤적의 허수축과의 교차점
근궤적의 허수축과의 교차점은 특성방정식으로부터 구해야하므로,

s에 대해 내림차순으로 정리하면,

이를 이용해 루스표를 작성하겠습니다.
루스표의 임계안정 조건으로부터 K값을 구할 수 있습니다.
다음으로 s^2차항으로부터 보조방정식을 세우면,

따라서 근궤적의 허수축과의 교차점은 다음과 같습니다.

2) 근궤적의 이탈점
근궤적의 이탈점 역시 전체 전달함수의 특성방정식으로부터 구해야 합니다.

이 방정식을 K에 대해 정리하면,

그리고 이 식을 s에 대해 미분하겠습니다.

바로 이 방정식의 해가 우리가 구하고자하는 근궤적의 실수축으로부터의 이탈점입니다. 따라서,
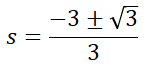
이 바로 근궤적이 이탈점이 됩니다.
그러나 주의할 점은 근궤적은 존재할 수 있는 영역이 있습니다. 위에서 살펴본 것처럼 이 제어계는 근궤적이 다음의 영역에 존재해야 합니다.
그런데 위의 두 근을 살펴보면,

의 영역에 있으므로 올바른 근궤적의 이탈점은 바로

가 됩니다. 이제 근궤적의 작성법을 이용해 그려보도록 하겠습니다.
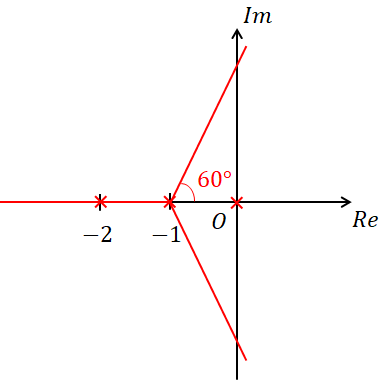
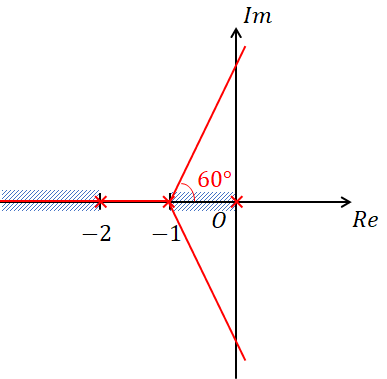
먼저 위의 영역에 근궤적이 존재해야하고, 근궤적은 극점에서 출발하므로 -2에서 출발하는 근궤적은 해당하는 영역의 점근선인 180도의 각도 즉, 실수축을 따라 음의 무한대 영역으로 나아가게 됩니다.
다음으로 -1과 0에서 출발하는 근궤적은 사이의 영역에 존재해야하므로 서로를 마주보며 다가오다가 우리가 구한 근궤적의 이탈점에서 만나 각각 60도 각도로 펼쳐진 점근선을 따라가게 됩니다. 그리고 이 근궤적은 위에서 구한 허수축과의 교차점을 지나야 합니다. 그럼 각각을 그려보면,

와 같이 그릴 수 있습니다.
'전기 > 제어공학' 카테고리의 다른 글
| [제어공학] 14. 상태방정식과 상태천이행렬 (6) | 2020.01.29 |
|---|---|
| [제어공학] 12. 보드선도 안정도 판별법 (3) | 2020.01.27 |
| [제어공학] 11-2. 제어계의 안정도(나이퀴스트 안정도 판별법) (1) | 2020.01.26 |
| [제어공학] 11-1. 제어계의 안정도(루스법) (0) | 2020.01.26 |
| [제어공학] 10. 보드선도 (0) | 2020.01.25 |



