- 나이퀴스트 안정도 판별법
지난 포스팅에 이어 제어계의 안정도를 판별하는 나이퀴스트 안정도 판별법에 대해 알아보도록 하겠습니다. 먼저, 나이퀴스트 안정도는 제어계의 안정도 중 상대 안정도를 판별하는 방법이었습니다. 상대 안정도란 다시 말하면,
- 상대 안정도
말 그대로 안정하다면 얼마나 안정한지를 나타내는 안정도입니다. 이를 알기 위해 지난번 주파수 함수와 벡터 궤적에 대해 살펴보았는데, 그때 나온 주파수 이득과 위상이 안정하다면 얼마나 안정한지 나타내게 됩니다.
즉, 이런 상대안정도를 나타내는 나이퀴스트 안정도는 제어계의 크기와 위상의 계산을 통해 얼마나 안정한지를 보여주게 됩니다. 이를 위해서 나이퀴스트 선도를 그려야하고, 이는 개루프 전달함수의 극좌표 사상을 통해 그릴 수 있습니다.
사상에 대해 잘 모르시더라도 지난번 보드선도를 그리며 이득 여유와 위상 여유에 대해 이해하셨다면 나이퀴스트 안정도의 개념에 대해서는 이해하실 수 있을거라 생각합니다.
그러니 먼저 나이퀴스트 안정도에 대해 살펴보고 이 사상에 대한 자세한 내용은 이후 다뤄보도록 하겠습니다.
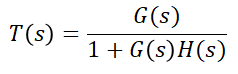
먼저, 안정도를 판별하기 위해서는 자연스럽게 특성방정식이 떠오르셨을 겁니다. 따라서 표준 Feed-back 제어계의 특성방정식을 가져오도록 하겠습니다.

이 특성방정식은 복소수 s에 대한 함수였고, 정리를 하면 다음과 같이 나타낼 수 있었습니다.

위와 같이 표현한다면, 특성방정식을 0으로 만드는 영점인 z1, z2, ... ,zn은 특성근이라는 사실을 알고 있고, 특성방정식을 무한대로 만드는 p1, p2, p3, ... ,pn은 특성방정식의 극점입니다.
여기서 다시 표준 Feed-back제어계의 전체 전달함수를 다시 보도록 하겠습니다.
이제 조금 햇갈릴 수 있는데, 전체 전달함수의 극점은 1+G(s)H(s)=0인 특성방정식의 근이고, 이 특성근은 특성방정식의 영점이라는 것입니다. 그리고 특성방정식의 분모를 전체 전달함수의 분모, 분자에 모두 곱해주게 된다면, 전체 전달함수의 영점은 특성방정식의 극점이 되겠죠.
여기까지 우리가 알고 있는 사실을 다시 정리해 보면,
1) 전체 전달함수 T(s)의 극점이 우반면에 존재하면 제어계는 불안정합니다.
2) T(s)의 극점은 1+G(s)H(s)의 영점입니다.
3) 이로부터 1+G(s)H(s)의 영점이 우반면에 존재하면 제어계는 불안정합니다.
4) T(s)의 영점은 개루프 전달함수 G(s)H(s)의 극점이자, 1+G(s)H(s)의 극점입니다.
그러므로 1+G(s)H(s)를 우반면 전체로 사상하여 이 사상된 평면으로부터 1+G(s)H(s)의 영점(T(s)의 극점)이 우반면에 존재하는지 살펴보는 것입니다.
그럼 사상에 대해서 한번 살펴보도록 하겠습니다.
1) F(s)의 사상
사상의 개념 자체는 간단합니다. 함수값은 변수에 의해 변화합니다. 이런 변수의 변화에 의한 함수값을 표현한 것을 사상이라고 합니다. 만약 F(s)=s-z1이고, z1은 실수축 위에 존재한다고 가정하겠습니다. 우리가 계속 사용하는 이 복소수 s는 본래 다음과 같은 형태였습니다.
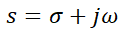
사상이라는 것은 이 s의 변화에 대해 F(s)값의 변화를 그리는 것이라 하였습니다. 따라서, 변수 s에 대한 그래프는 s평면에 그려질 것이고, 이로부터 사상된 값은 F(s)평면에 그려지게 됩니다.
그럼 위의 F(s)의 영점인 z1의 주변을 둘러싸는 경로를 따라 변화하는 F(s)값은 어떻게 나타나는지 즉, F(s)의 영점을 포함하는 경로를 사상하면 다음과 같습니다.

이렇게 s평면에서 정의된 어떤 s값이 z1을 포함하는 경로를 따라 시계방향으로 회전하게 될 때, F(s)평면으로 사상하게 되면, 위와 같이 F(s)평면에서 원점을 중심으로하는 경로를 따라 한 바퀴 회전하는 경로로 나타나게 됩니다.
만약 s평면 우반부에 영점이 2개 존재하여, 이 두개의 영점을 모두 포함하여 둘러싸는 경로로 사상하게 되면 어떻게 될까요? 결론부터 말씀드리면, F(s)평면에서 2회전을 하게 됩니다. 자세한 내용을 다루기 전엔 일단 이 정도만 기억하고 나이퀴스트 선도에 대해 살펴보도록 하겠습니다.
지금까지 살펴본 바에 의하면 s평면의 우반부에 F(s)의 영점(T(s)의 극점)이 존재하여 이 F(s)의 영점을 포함하는 어떤 경로로 F(s)평면에 사상하게 되면 F(s)평면에는 원점을 포함하는 경로로 나타나게 된다는 것을 알았습니다.
그러나 우리가 궁극적으로 궁금한 것은 안정도의 판별이고, 이 안정도를 판별하는 중요한 기준은 T(s)의 극점이 좌반면에 존재해야 한다는 것이며, 이는 F(s)의 영점이 좌반면에 존재해야 한다는 것입니다.
따라서 나이퀴스트 선도란 이 s평면의 우반면 전체를 F(s)평면에 사상했을 때 만약 우반면에 F(s)의 영점이 존재한다면 그 경로는 원점을 포함하는 경로로 나타날 것이고, 영점이 존재하지 않는다면 그렇지 않다는 것입니다. 즉,
(1) 나이퀴스트 선도가 원점을 포함한다 : 불안정
(2) 나이퀴스트 선도가 원점을 포함하지 않는다 : 안정
이라는 사실을 알 수 있는 것입니다. 따라서 안정도 판별법에 대해 다시 살펴보도록 하겠습니다.
2) 나이퀴스트 안정도 판별법
다음과 같은 특성방정식을 살펴보도록 하겠습니다.

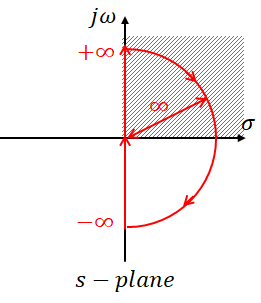
나이퀴스트 선도는 s평면의 우반면 전체를 사상하는 것이므로 s평면에서 그 경로를 살펴보면,
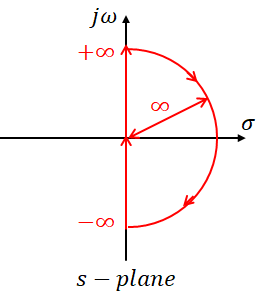
의 경로로 사상하는 것입니다. 즉, 우반부 전체를 포함해 회전하는 것입니다. 그렇다면 결국, F(s)평면상에 우리가 그리고 싶은 그림은 F(s)의 변수인 s의 실수부가 0일 때, jw가가 음의 무한대에서 0, 0에서 무한대로 이동하고, 이후 크기는 무한대인 반원을 그리는 경로를 따라 움직이는 F(s)값들입니다.
그런데 우리는 이미 이러한 그림을 그리는 것에 대해 경험을 해 보았습니다. 바로 벡터궤적이었습니다.
벡터 궤적 또한, 어떤 s함수에 jw를 대입해 그 크기와 위상을 계산하고 w의 변화에 따른 궤적을 그린 것이었습니다. 따라서 벡터 궤적을 공부하며 살펴보았던 전달함수 하나를 가져오도록 하겠습니다.

우리는 이런 전달함수의 벡터 궤적을 그려보아 다음과 같다는 것을 알고 있습니다.

그런데 이 궤적은 우리가 양의 무한대인 영역에서만 살펴본 궤적이었습니다. 아래의 영역이죠.
따라서 음의 무한대까지 영역을 확장하게 된다면, 그 값들은 실수축에 대해 대칭인 형태로 나타나게 될 것입니다.
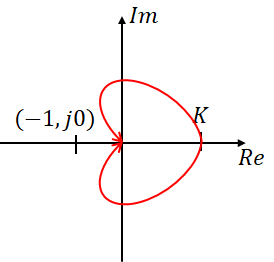
그러나 우리가 궁금한건 F(s)=1+G(s)H(s)로 이 모든 값들에 대해 1이 추가된 값입니다. 간단하게 원래의 전달함수의 s에 0과 무한대를 대입해보면, 시작점과 끝점이 각각 K+1, 1이 된다는 사실을 알 수 있습니다. 따라서 구하고자 하는 나이퀴스트 선도는 다음과 같습니다.

따라서 벡터궤적을 잘 이해하셨다면 그림을 그리는 것 자체는 크게 어려움은 없으실거라 생각합니다. 이를 통해 알 수 있는 것은 만약 저러한 형태로 나와 원점을 끼고 회전을 하지 않는다면 우반부에 F(s)의 특성근이 없었던 것이므로 이 제어계는 안정하다는 사실을 알 수 있습니다.
3) 간이화 나이퀴스트 안정도 판별법
위의 나이퀴스트 선도를 작성하는 것 처럼 F(s)=1+G(s)H(s)가 아닌 개루프 전달함수 G(s)H(s)의 주파수 응답을 이용해 나이퀴스트 선도를 그리고 그로부터 안정도를 판별하는 방법을 간이화 나이퀴스트 안정도 판별법이라고 합니다.
이 간이화 나이퀴스트 안정도 판별법에서 주의할 점은 개루프 전달함수를 이용하기 때문에(특성방정식 F(s)=1+G(s)H(s)의 1이 없음) 안정도 판별의 기준이 원점이 아니라 (-1, j0)이 된다는 점입니다.
그럼 간이화 나이퀴스트 선도를 그리기 위해 어떤 G(s)H(s)가 있고, 이를 주파수 전달함수 G(jw)H(jw)로 바꿔 아래와 같은 나이퀴스트 선도를 그렸다고 가정하겠습니다.

양의 무한대 영역에서 그림을 위와 같다면, 음의 무한대 영역에서는 실수축 대칭이므로 한 영역에서만 그림을 그려보았습니다. 이렇게 위와 같이 그림이 그려졌을 때, 우리가 알고 있는 사실을 한 번 정리해보겠습니다.
(1) G(jw)H(jw)를 그렸으므로 안정도 판별의 기준은 (-1, j0)이다.
(2) Q가 -1보다 크다면(그래프가 (-1, j0)을 포함하지 않는다면), 이 제어계는 안정하다.
(3) Q가 (-1, j0)이라면, 이 제어계는 임계 안정이다.
(4) Q가 -1보다 작다면(그래프가 (-1, j0)을 포함한다면), 이 제어계는 불안정하다.
그럼 (2), (3), (4)의 경우를 그래프로 다시 그려보면,
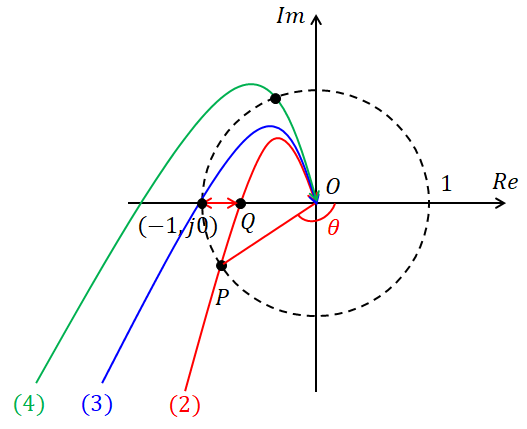
위와 같이 나타낼 수 있습니다.
여기서 Q점은 위상교차점, P점은 이득교차점이라고 합니다. 여기까지는 쉽게 이해할 수 있는 사실들입니다. 그러나 나이퀴스트 안정도 판별법은 상대안정도를 판별하는 것이고, 안정하다면 얼마나 안정한지까지 알 수 있습니다.
그림을 보면, 나이퀴스트 선도가 왼쪽으로 점점 벌어지며 Q점이 -1이 되면 임계안정하고 그 이상으로 넘어가면 불안정해 집니다. 따라서 위의 제어계는 OQ의 길이가 1이 되기까지의 여유분이 있는 것입니다. 바로 이 크기의 여유분을 이득 여유라고 합니다.
다시 말하면, 이득 여유는 G(jw)H(jw)가 음의 실수축과 만나는 점(허수부=0)이며 계산된 개루프 주파수 전달함수 크기의 역수를 말합니다.

위상의 관점에서 보면, 현재 이 안정한 제어계가 임계안정해지려면 P점이 점점 올라가 -1에 도달해야 할 것입니다. 즉, P점에서의 위상 θ가 점점 커지며 180도가 되면 이 제어계는 임계안정하고 그 이상이 된다면 불안정해집니다. 이 위상 차이를 위상 여유라고 합니다.
다시 말하면, 위상 여유는 G(jw)H(jw)의 크기가 1인 점과 음의 실수축 간에 형성되는 사이각입니다.

그렇다면 이득여유는 개루프 주파수 전달함수의 허수부를 0으로 만드는 w를 찾아 위 식에 대입하고, 위상여유는 개루프 주파수 전달함수의 크기가 1이되는 w를 찾아 위상각을 구하면 간단하게 찾을 수 있습니다.
'전기 > 제어공학' 카테고리의 다른 글
| [제어공학] 13. 근궤적 (6) | 2020.01.28 |
|---|---|
| [제어공학] 12. 보드선도 안정도 판별법 (3) | 2020.01.27 |
| [제어공학] 11-1. 제어계의 안정도(루스법) (0) | 2020.01.26 |
| [제어공학] 10. 보드선도 (0) | 2020.01.25 |
| [제어공학] 9. 주파수 응답과 벡터 궤적 (2) | 2020.01.22 |



